I Arkitektföreningsskolan i London arbetar de med Graduate Design-programmet på designstudier om "beteendekomplexitet", särskilt 3D-printade och pneumatiska robotar som uppfyller ett enda, mycket specifikt syfte eller funktion enligt en enda "enkel" algoritm. Synergia är till exempel ett koncept för programmerbar materia med pneumatiska robotkubsvärmar, OwO är något som robotmaggots för offentliga utrymmen.

AADRL Spyropoulos Design Lab 2016 (fas 2)
Kreativa applikationer har en översikt över Slutuppsatser 2016. Man kan halvt strunta i informationstexterna, eftersom det alltid finns en massa pretentiösa designklockor och visselpipor från bärare av polotröja, men själva arbetet kan faktiskt vara för NASA och deras pneumatiska moduler som det. Bigelow Space Habitat att vara intressant.
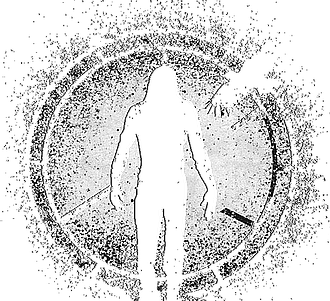
Följande är arbetet från AADRL Spyropoulos Design Lab, som har utforskat beteendebaserade designsystem som är självmedvetna, mobila och självstrukturerande och monterade. Forskningen utforskar agenter för hög befolkningsrörlighet som utvecklar design som går bortom ändliga föreställningar om rymden mot en som samutvecklas och anpassar sig. Forskningen tittar på att utveckla strategier för intelligenta designenheter som genom organisation utvecklar kroppsplaner som ger nya beteenden att växa fram. Ett exempel på detta är OWO-projektet under vilket som en singulär enhet konceptualiseras som en enhet som genom inbäddad pneumatik gör att enheten kan expandera / dra ihop sig, krulla och rulla. Med avseende på rörlighet som en individuell enhet kan den rulla i sitt mobilitetsläge, men till exempel en enhet ansluts till två andra enheter, då tillåter kroppsplanen en stativkonfiguration, vilket gör att varelsen kan gå.
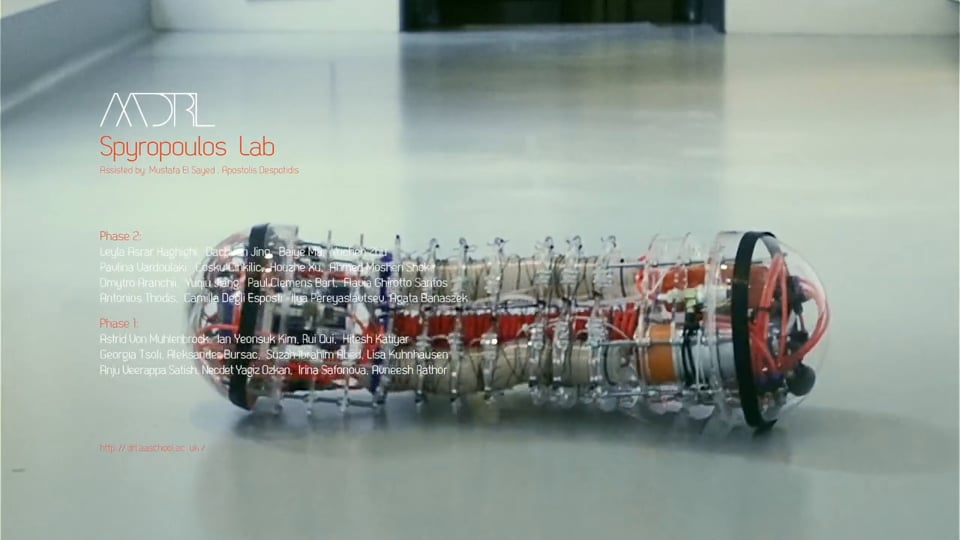
AADRL Spyropoulos Design Lab
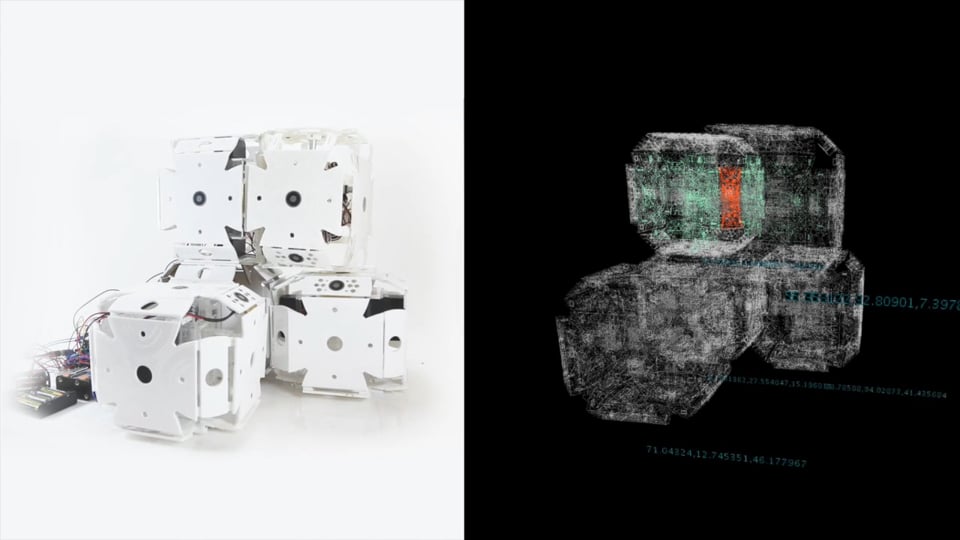
AADRL Spyropoulos_HyperCell
Mer till dig:






 "Dravens Tales from the Crypt" har varit förtrollande i över 15 år med en smaklös blandning av humor, seriös journalistik – för aktuella händelser och obalanserad rapportering i presspolitiken – och zombies, garnerad med massor av konst, underhållning och punkrock. Draven har gjort sin hobby till ett populärt varumärke som inte kan klassificeras.
"Dravens Tales from the Crypt" har varit förtrollande i över 15 år med en smaklös blandning av humor, seriös journalistik – för aktuella händelser och obalanserad rapportering i presspolitiken – och zombies, garnerad med massor av konst, underhållning och punkrock. Draven har gjort sin hobby till ett populärt varumärke som inte kan klassificeras.
Min blogg var aldrig designad för att sprida nyheter, än mindre bli politisk, men med aktualiteter kan jag bara inte låta bli att fånga upp information här som annars är censurerad på alla andra kanaler. Jag är medveten om att designsidan kanske inte verkar "seriös" för många i detta avseende, men jag kommer inte att ändra detta för att tillfredsställa "mainstream". Den som är öppen för icke-statskonform information ser innehållet och inte förpackningen. Jag har försökt tillräckligt med att förse folk med information under de senaste 2 åren, men märkte snabbt att det aldrig spelar någon roll hur det är "paketerat", utan vad den andra personens inställning till det är. Jag vill inte lägga honung på någons mun för att möta förväntningarna på något sätt, så jag kommer att behålla den här designen för förhoppningsvis kommer jag någon gång att kunna sluta göra dessa politiska uttalanden, för det är inte mitt mål att fortsätta så här för alltid ![]() Jag lämnar upp till var och en hur de hanterar det. Du är välkommen att kopiera och distribuera innehållet, min blogg har alltid legat under WTFPL-licens.
Jag lämnar upp till var och en hur de hanterar det. Du är välkommen att kopiera och distribuera innehållet, min blogg har alltid legat under WTFPL-licens.
Jag tycker det är svårt att beskriva vad jag faktiskt gör här, DravensTales har blivit en kulturblogg, musikblogg, chockblogg, techblogg, skräckblogg, rolig blogg, en blogg om hittade artiklar på internet, internet bisarr, skräpblogg, konstblogg, varmvattenberedare, zeitgeist blogg genom åren , Skrotblogg och greppväska blogg kallas. Allt som är rätt ... - och ändå inte. Huvudfokus för bloggen är samtida konst i ordets vidaste bemärkelse.
För att säkerställa driften av sajten är du välkommen att Gör en donation med kreditkort, Paypal, Google Pay, Apple Pay eller direktdebitering/bankkonto. Stort tack till alla läsare och supportrar av denna blogg!